Research at the KIT BioRobotics Lab (HCR)
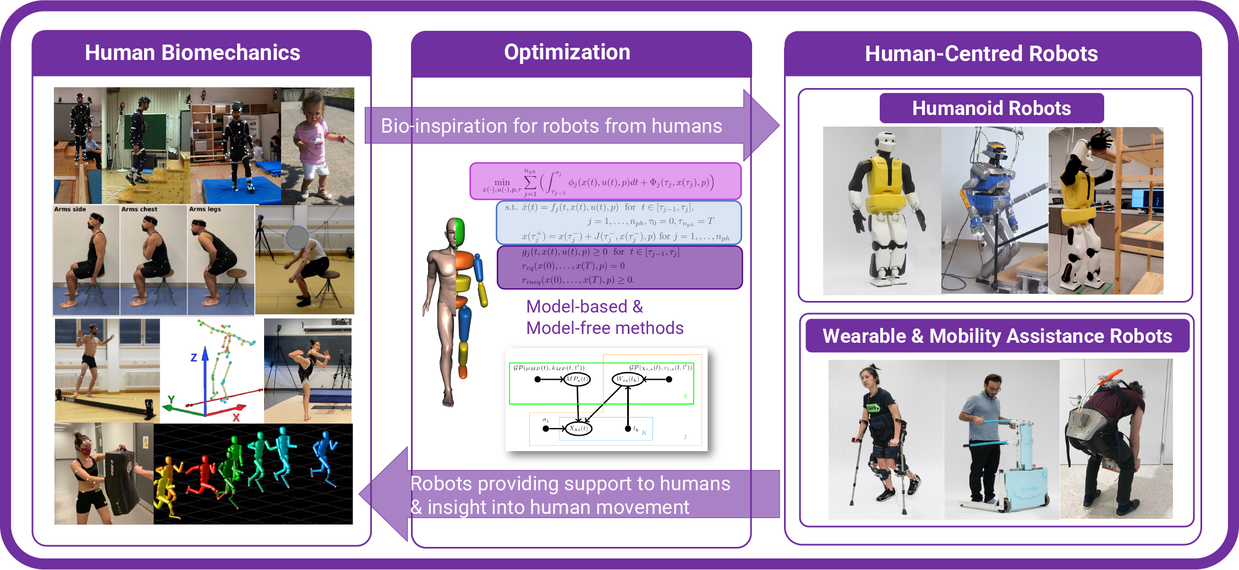
Our research covers three highly interconnected topics, as shown in the picture:
- Human biomechanics - Analysis and improvement of human movement
-
Optimization & AI foundation - Models and algorithms for simulation, optimization, control and learning
-
Human-centred robotics – Design and control of (a) Humanoid robots and (b) Wearable & Mobility assistance robots
Closing the loop from humans to human-centered robots and back: Human biomechanics provide important bio-inspiration and knowledge about human movement to humanoids, wearable & mobility assistance robots to allow them to mimic human motion capabilities, predict their motions, and interact with them. These robots give back to humans by providing support in various ways, but the research in robotics also offers new insights into human movement from a different angle.
Our research is based on all three pillars of science: theory, practical experiments, and scientific computing.
More details about our research areas can be found by clicking on the icons below: