Research in Humanoid Robots
In the area of humanoid robots, our main interest is in full-size whole-body humanoid robots, but we also consider upper-body humanoids with stable wheeled platforms for some applications. For whole-body humanoid robots, motion generation and control is particularly challenging due to their underactuated structure with many degrees of freedom, the reduced speed and strength compared to healthy young humans, and the necessity of a bipedal structure to balance. Our research in humanoid robots focuses on the following topics:
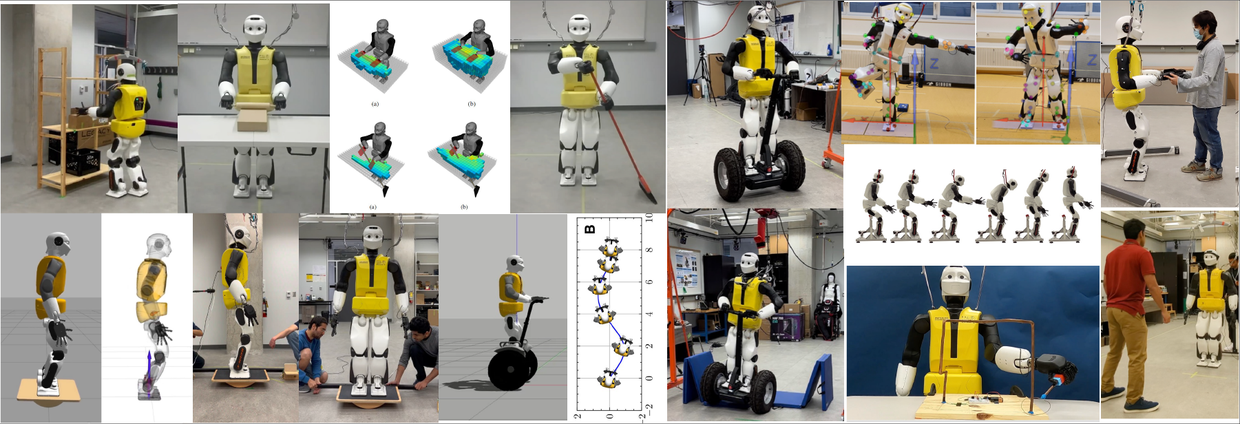
- The generation and control of autonomous motions for humanoids in challenging environments such as walking on different terrains, and typical outdoor and indoor situations, aiming for human-like movements in robots. In many cases, optimal control methods based on whole-body models or template models are used for motion generation control, but we also look at simpler representations of these optimal solutions like movement primitives or neural networks to increase efficiency ans at reinforcement learning methods. The motions we have considered so far include walking on flat floor, step stones, stairs, slopes, slippery floor, stepping over obstacles.
- Robots interacting with complex objects which have their own dynamics or impose complex constraints on the robots. This includes the manipulation of specific tools or toys (such as a yoyo), but also the use of “tools” for efficient locomotion, such as personal transporters like Segways or scooters, skateboards or skates. The robot has to plan and control its own motion while being able to react to and manipulate the complex dynamics of the object. This research area also includes the bimanual manipulation of objects which – while being passive - introduce symmetric or asymmetric coupling constraints on the robot’s hands. For all these cases we develop specific performance indicators and motion generation and control methods, considering specific . The goal in this research area is to move towards robot-robot interaction in typical collaborative scenarios with close connection such as joint object handling.
- Physical-social human-robot interactions (psHRI), taking into account physical aspects of human-robot interaction (performing desired physical tasks in a safe way) and social /psychological aspects, evaluating the effect of motion styles on the human collaborator. We are in particular interested in interactions in close proximity and with extended contacts, and the effect fo robotic touch on humans. There are a number of applications for this when introducing humanoid robots in medical testing and interventions (COVID nasal swab testing) and robots in medical and elderly care. In addition, we are interested in social interactions of humanoid robots with children and the effect of over-imitation.
- A systematic performance evaluation in humanoid robots, i.e. benchmarking of robot performance. Benchmarking is important to foresee how a robot will perform in a planned real world application, and includes the specification of standardized testbeds, protocols and performance indicators. This research was started within the Eurobench project and is currently extended. Testbeds and benchmarking procedures considered involve various walking scenarios like stairs, rough or slippery terrain, obstacles courses, manipulation and pick and place testbeds, and sit to stand transfers, but in the long term we also aim for real life scenarios that robots will be used in, such as manufacturing scenarios, mimicking typical disaster sites, manufacturing environments, household and typical hospital & care situations.

Corresponding human motion studies (Research in Biomechanics) as well as computational models and methods (Research in Optimization) play an important role for all humanoid robot research.